阀门定位器是控制阀的重要附件,实质上是一个定值控制的闭合回路, 它与气动执行机构配套使用,可以改善控制阀的静态和动态特性、客服阀杆摩擦力和消除不平衡力的影响,实现控制阀根据控制信号的准确定位,最终保证控制系统和工业过程有效运行。
喷嘴挡板定位器
喷嘴挡板定位器是按力平衡原理设计工作的,其工作原理方框见←图所示,它是按力平衡原理设计和工作的。
当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用, 若要改变作用方式,只要将凸轮翻转 ,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
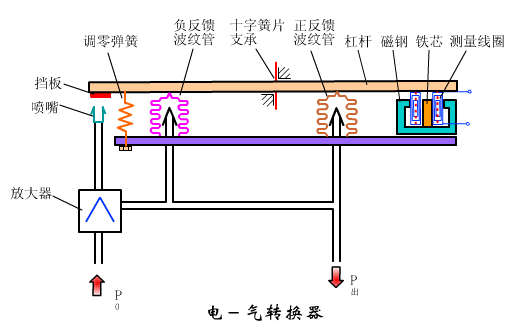
在其内部有一线圈,当调节器(变送器)的电流信号送入线圈后,由于内部永久磁铁的作用,使线圈和杠杆产生位移,带动挡板接近(或远离)喷嘴,引起喷嘴背压增加(或减少),此背压作用在内部的气动功率放大器上,放大后的压力一路作为转换器的输出,另一路馈送到反馈波纹管。输送到反馈波纹管的压力,通过杠杆的力传递作用在铁芯的另一端产生一个反向的位移,此位移与输入信号产生电磁力矩平衡时,输入信号与输出压力成一一对应的比例关系。即输入信号从4mA.DC改变到20mA.DC时,转换器的输出压力从0.02~0.1MPa变化,实现了将电流信号转换成气动信号的过程。
图中调零机构,用来调节转换器的零位,反馈波纹管起反馈作用。电-气转换器接受DCS给出的4~20mA直流信号,然后按比例地转换输出20~100kpa的气动信号,作为气动薄膜调节阀、 气动阀门定位器的气动控制信号和其他气动仪表的气源,它起到电动仪表与气动仪表之间的信号转换作用。
喷嘴挡板智能定位器
这种阀门定位器也是一种具有HART通信协议的阀门定位器,由三部分组成:微处理器电子控制的模件,包括HART通信模块和就地用户界面开关;喷嘴挡板原理的电/气动转换器;阀位传感器。
工作原理是,控制器来的控制信号经端子盒进到印刷线路板子模块,在这里被微处理器读取后经数字算法处理后转换成模拟量后送给I/P转换器。当信号改变时I/P转换器的线圈和衔铁之间的磁吸引力改变,并因此改变了喷嘴挡板间的距离进而改变了喷嘴背压,该背压经放大器放大后送给执行机构并通过执行机构改变阀杆的位置。阀行程传感器通过反馈杆感受阀杆位置的变化,并将此信号反给印刷线路板组件参与计算。当阀杆位置达到正确位置,阀杆位置信号反到印刷线路板组建,经过处理后使I/P驱动信号稳定下来,则喷嘴背压稳定下来,则到执行机构的输出力也稳定下来阀杆位置不再变化。
压电式智能定位器
这种阀门定位器也是一种具有HART通信协议的阀门定位器,由三部分组成:微处理器电子控制的模件,包括HART通信模块和就地用户界面开关;电/气动转换器模件的压电阀;阀位传感器。
对于晶体构造中不存在对称中心的异极晶体,加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场。这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。1880
年居里兄弟发现了电气石的压电效应,从此开始了压电学的历史。压电式气动换向阀即是利用压电逆效应而研制的。
压电材料的变形量正比于施加在其上的电场强度,利用这一特点,可以开发出比例调压阀。如图3
所示,施加不同的控制电压到压电阀片上,压电阀片产生不同的弯曲变形量,这样就在进气口1 与输出气口2 之间及输出气口2 与排气口3
之间形成不同的气流阻力,从而在输出气口2
的得到不同的气体压力。由于压电阀片在变形过程中不受机械摩擦力,且压电阀片有响应快功耗低的特点,基于压电阀片的电气比例调压阀很多性能优于传统的比例调压阀。例如其没有死区,压力可以从零开始连续调节;其响应快,可满足高速系统的应用要求;其功耗低,对电源功率要求低。
整个控制回路由两线、4~20mA信号控制。HART模件送出和接收叠加在4~20mA信号上的数字信息,实现与微处理器的双向数字通信。模拟量的4~20mA信号传给微处理器,与阀位传感器的反馈进行比较,微处理器根据偏差的大小和方向进行控制计算(一级控制),向压电阀发出电控指令使其进行开、闭动作。压电阀依据控制指令脉冲的宽度对应于气动放大器输出压力的增量,同时气动放大器的输出又被反馈给内控制回路,再次与微处理器的运算结果进行比较运算(二级控制),通过两级控制输出信号到执行机构,执行机构内空气压力的变化控制着阀门行程。当控制偏差很大时,压电阀发出宽幅脉冲信号,使定位器输出一个连续信号,大幅度的改变至执行机构的信号压力驱动阀门快速动作;随着阀门接近要求的位置,命令要求的位置与测得位置的差值变小,压电阀输出一个较小脉宽的脉冲信号,断续、小幅度的改变至执行机构的信号压力,使执行机构接近新命令位置的动作平缓。当阀门到达要求的位置(进入死区)时,压电阀无脉冲输出,定位器输出保持为零,使阀门稳定在某一位置不动。
调校
通过就地用户界面设置开关,可完成定位器的增益、正反作用、定位器特性以及是否允许自动调校等基本设置;在不增加工具的条件下,能够进行自动或手动校准定位器;可以通过就地用户界面手动控制按钮,实现手动控制调节阀。
滑(梭)阀式智能定位器
定位器的附加功能
阀位反馈功能:带4-20mA反馈信号
诊断功能:比如FISHER DVC6000PD版本
三断保位功能:比如ABB,西门子,YTC2500都有此功能,一般用于电厂。

